12月1日,机器人领域顶级期刊IEEE Transactions on Robotics在线刊登了我院智能制造装备与技术全国重点实验室白坤教授团队在机器人万向变刚度驱动最新研究成果“A Variable Stiffness Spherical Joint Motor by Magnetic Energy Shaping(磁能场整形可变刚度球关节电机)”(DOI: 10.1109/TRO.2023.3336319)。 我校智能制造装备与技术全国重点实验室为论文第一完成单位,我院硕士研究生李孟轲为第一作者,白坤教授为论文通讯作者,我院博士生肖千红、刘陈杰及硕士生王泽辉参与了该研究。该项工作得到国家自然科学基金基础科学中心项目“机器人化智能制造”(No. 52188102)以及湖北省科技人才创新计划(No. 2023DJC141)资助。

为了使机器人能够在非结构化环节中更加安全高效地实现人-机-环境的共融,关节的顺应性是新型智能机器人的主要发展趋势之一。现有顺性方法主要通过力的测量控制或者基于弹性元件的变刚度驱动来实现。前者难以克服在未知环境交互中的不稳定问题,后者虽能通过固有的弹性实现高效稳定顺应,但弹性元件需要异常复杂的变刚度机构限制了机器人(尤其是多自由度关节)的灵巧设计。针对这一问题,研究团队提出一种通过控制机器人关节电机磁场进行万向刚度调节的方法。通过控制电机电流形成在任意位置的“凹陷”磁能场,电机转子将处于凹陷位置的平衡点且关节刚度可通过磁能场的梯度调节。该方法不需要位置或力的测量控制,且在不需要任何弹性元件的条件下实现机器人关节各方向固有刚度与三维旋转姿态的动态实时调节。
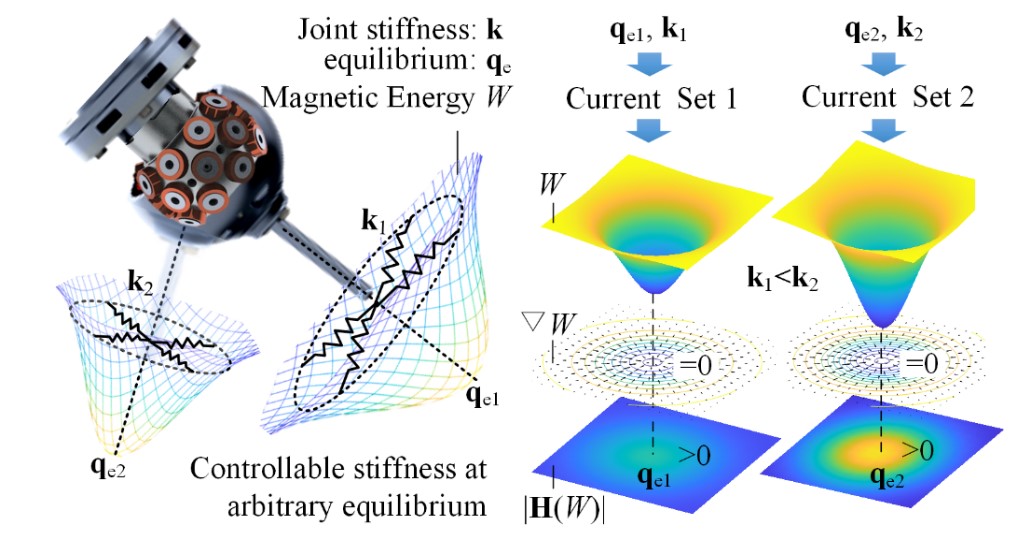
基于磁能场整形的万向变刚度方法

机器人灵巧变刚度关节驱动设计
团队研制了具有可变刚度的机器人的灵巧球关节驱动系统,搭载于KUKA机器人腕关节,验证了在任意理想平衡位置实时调节关节刚度方法的有效性。该驱动不仅可以实现刚度的准确实时调节,还可以通过连续改变平衡点实现三维旋转姿态的实时控制。

关节刚度矩阵测试及验证
配备有该灵巧手腕的机器人凭借其柔性操作能力进行了大倾角轴孔装配的演示。与传统方法依赖力矩传感器执行轴孔操作方法不同,具有弹性变刚度手腕关节的机器人能够通过灵活配置手腕刚度高效完成任务,整个过程无需力传感器,并且可以适用于具有大范围倾斜角度的轴孔装配(超过30度),无需示教或基于先验知识的编程。

机器人柔顺关节轴孔装配演示
对于机器人来说,在非结构化环境中实时探测交互对象的刚度并确保与其稳定接触是至关重要的。研究团队利用具有柔顺关节的机器人实现了对非结构化目标形状和刚度的实时感知与稳定接触。在与由四种不同硬度的柔性材料制作的目标物体交互过程中,机器人在对环境完全未知的情况下凭借关节固有的顺应性实现了稳定的交互,并在过程中实现对目标边缘几何形状和连续变化刚度的准确动态测量。

机器人对非结构化目标形状和刚度的动态实时感知与稳定动态交互
该机器人灵巧驱动和变刚度方法为机器人的灵巧顺应提供了增强性能和创新功能,有望在医疗机器人、人形机器人、服务机器人等方面获得更广泛的应用。
论文链接:https://ieeexplore.ieee.org/document/10328708


 学院微信公众号
学院微信公众号